Præcise grebsbevægelser, nøjagtig hastighedsregulering og adskillige installationsmuligheder
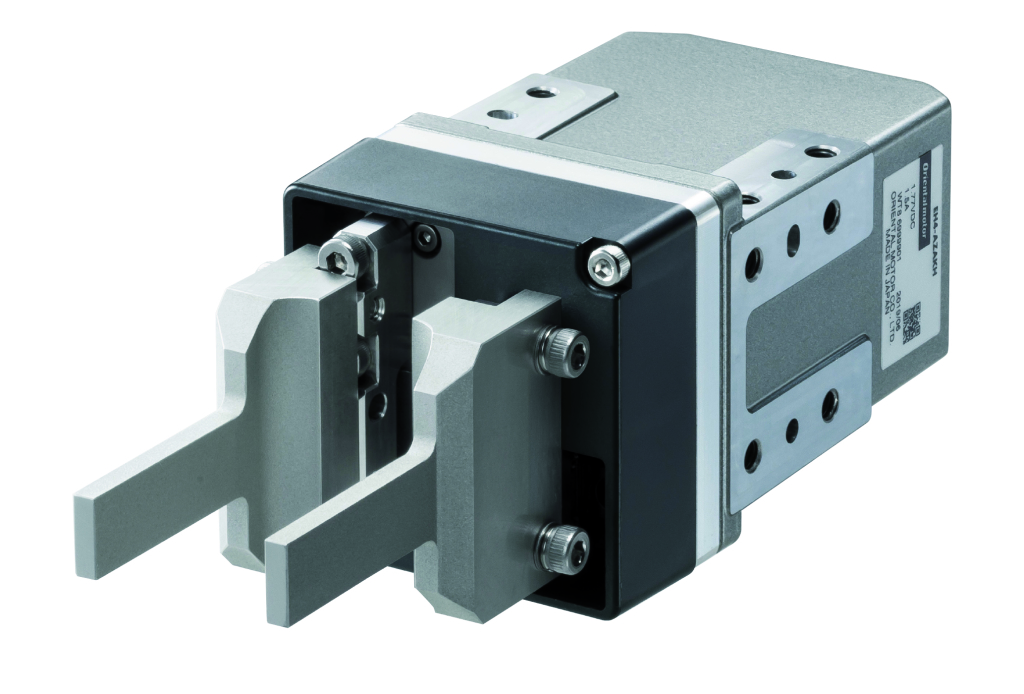
Gribere anvendes som endeeffektorer til robotter og andre automatiske maskiner og kan opdeles i pneumatiske og motoriserede gribere i henhold til deres funktionsprincip. Pneumatiske gribere er meget udbredt på grund af deres enkle funktionsprincip, men Oriental Motor’s EH-serie af elektriske gribere i kombination med AZ-seriens stepmotorer tilbyder en række interessante fordele, især med hensyn til følsomhed og kontrol af gribeprocessen.
De udbredte pneumatiske gribere er lette, billige og nemme at betjene, men det er vanskeligt at justere gribekraften og hastigheden præcist. Når disse egenskaber er vigtige, har elektriske gribere en klar fordel, fordi de giver brugeren mulighed for at justere gribseraften, hastigheden og positionen præcist i forhold til emnet. Dette forhindrer ikke kun pludselig påvirkning af arbejdsemnet, men gribekraften og cyklustiden optimeres også. Motorens position kan bruges til at fastslå, om der er et emne til stede, og hvis det er tilfældet, kan dets dimensioner også kontrolleres. I den elektriske griber i EH-serien tjener AZ-stepmotoren som drev og er kombineret med en griber og en tandstangsmekanisme. Den største fordel ved denne konstellation er den allerede nævnte mulighed for at justere gribekraften.
Enkelt design, optimal funktionsmåde
Selvom pneumatiske gribere ofte anvendes i pick & place-applikationer, når disse gribere deres grænser, når det drejer sig om at gribe emner med lav stivhed med forsigtighed. Det er netop her, at elektriske gribere udfolder deres fordele.
Med EH-serien er der f.eks. ikke brug for yderligere sensorer til at bestemme slutpunktet for gribeprocessen eller til at måle emnet; disse processer er fuldt automatiserede. Desuden gør jævnstrømsforsyningen EH-griberen ideel til brug i batteridrevne enheder som f.eks. automatiserede guidede køretøjer (AGV’er) eller mobile robotter.
Et griberdesign kan implementeres mekanisk på en række forskellige måder, f.eks. med et sneglehjul, cam og spindel eller tandstang- og tandhjulsmekanisme. EH-serien anvender sidstnævnte for at opnå høj transmissionseffektivitet og kontinuerlig gribekraft.
Kombinationen med en 28 mm motor holder griberens dimensioner små. Slaglængden er 25 mm, så arbejdsemnet med forskellige formater kan gribes op til denne afstand uden at skulle udskifte fingrene. Takket være den optimale smøring er griberen i stand til at udføre 20 millioner gribeoperationer uden problemer i test med fuld grebskraft.
AZ-motoren er det ideelle drev til elektriske gribere
Motoren er en AZ-serie motor med multiturn absolut sensor (ABZO-sensor). I tilfælde af strømafbrydelse bevarer ABZO-sensoren mekanisk positionsoplysningerne og gør det muligt for maskinen at fortsætte driften uden at skulle tilbage til start. Dette eliminerer behovet for en ekstern kontakt til homing og reducerer mængden af design, ledninger og justering, der er nødvendig.
Stabil og finjusterbar gribekraft
Med pneumatiske gribere reguleres gribekraften ved hjælp af en trykmåler via en trykreduktionsventil. Finjustering er vanskelig i dette tilfælde. Lufttrykstabet afhænger af længden og den indvendige diameter af ledningen fra kompressoren til regulatoren samt af omgivelsestemperaturen og skal efterjusteres, hvis disse forhold ændres.
De elektriske gribere kræver ingen trykluftinfrastruktur og trykreguleringen er enklere: EH-serien anvender kontinuerligt tryk på arbejdsemnet, og motorstrømmen kan justeres i 1% intervaller i forhold til den maksimale værdi – hvilket giver mulighed for finjustering. Systemets tandstangsmekanisme med lavt tab sikrer en stabil gribekraft uanset omgivelsestemperaturen. Desuden har længden af tilslutningskablet ingen negativ indvirkning på gribekraften takket være driverens konstante drift.
Flere fordele med hensyn til hastighed
Pneumatiske gribere regulerer åbning og lukning af fingrene ved at ændre luftmængden. Dette er dog ikke uproblematisk, da luften reagerer på tryk- og temperaturudsving ved at udvide sig eller trække sig sammen. Dette kan have en negativ indvirkning på hastighedsstabiliteten og -kontrollen. EH-griberen har en høj pålidelighed takket være motordriften: Fingrenes hastighed, acceleration og køreafstand kan indstilles præcist, og cyklustiden kan beregnes.
Forkortelse af cyklustiden mulig
I pneumatiske gribere justeres grippekraft og hastighed ved at variere lufttrykket og luftstrømmen, som påvirker hinanden og er vanskelige at justere uafhængigt af hinanden. Desuden er det ikke let at ændre flowhastigheden og hastigheden under drift. Når luftstrømmen skifter fra styringen til griberen ved at åbne og lukke magnetventilen, er der en forsinkelse på 10 ms eller mere fra aktivering af magnetventilen til starten af fingerbevægelsen. Det betyder, at fingrene åbner og lukker hurtigere, men at det tager længere tid at afslutte gribeoperationen.
Mulighed for drift med forskellige parametre
Da gribekraft, hastighed og position kan styres separat med de elektriske gribere, er det nemt at anvende en kombination af disse parametre. I positioneringstilstand kan fingrene f.eks. bevæge sig til en bestemt position med en højere hastighed, og i tryktilstand nærmer de sig derefter emnet med en lavere hastighed. På denne måde kan cyklustiden øges betydeligt. Desuden er tiden mellem startsignalet og bevægelsens begyndelse kortere med en elektrisk griber end med en pneumatisk griber. Det langsomme greb af emnet er især fordelagtigt i applikationer, hvor skrøbelige eller bløde emner skal gribes og flyttes.
AZ-stepmotoren, der er monteret i EH-griberen, er udstyret med en absolut sensor, så der ikke er behov for eksterne kontakter til start og stop af bevægelsen. Afslutningen af gribebevægelsen sker f.eks. via udgangssignalet TLC og kontrollen af tilstedeværelsen af et arbejdsstykke via udgangssignalet AREA.
Særlig anvendelse – Dimensionering af arbejdsemner
EH-griberen er også i stand til at dimensionere arbejdsemner. Hertil udføres først en gribeproces uden et emne, og grundpositionen indstilles ved hjælp af CLR- og P-PRESET-signalerne. Derefter gribes arbejdsemnet, og størrelsen beregnes på grundlag af den position, der registreres af driveren, som følger: L = 2 – x – ∆L. Hvor L er den beregnede værdi af emnets dimension i mm og x er den registrerede position [trin]. ∆L angiver den mindste køreafstand (køreafstand pr. impuls) i mm.
Gribning af skrøbelige arbejdsemner
De tidligere forklaringer om EH-seriens gribeproces omhandlede griberens tryktilstand, dvs. at den samme gribekraft anvendes kontinuerligt uanset arbejdsemnet. For særligt skrøbelige emner er der et alternativ til at anvende en positioneringsoperation. Stator og rotor på en stepmotor er forsynet med små tænder. Når viklingen (spolen) på en statorpol aktiveres, tiltrækker tænderne på stator og rotor hinanden og står over for hinanden i enden. Hvis der påføres et drejningsmoment på akslen på en stationær motor, kan akslen drejes en smule. Dette forhold mellem drejningsmoment og akslens rotationsvinkel kaldes vinkel-drejningsmomentet. Under gribefingrenes lukkebevægelse påføres nu det drejningsmoment, der er vist i faserne 1- 3 kan nu anvendes. Fingrene griber fat i emnet med en afstand, der er mindst lige så kort som emnets dimension, og genererer dermed gribekraften. Denne proces styres ved hjælp af driftstrømsværdien. Denne metode til generering af gribekraften anbefales til små emner og til en gribekraft på mindre end 6 N, da det er vanskeligt at arbejde under tryk i dette område.
Vil du høre mere om de elektriske gribere?
Kontakt os i dag, og lad os finde den helt rigtige løsning til netop dit behov. Du træffer dit Eegholm team på telefon 7312 1212.